An Improved Algorithm for Traditional Image Inpainting
Author: Songlin Zhao, Zijin Cui, Zhen Tong
Motivation
The technology of image inpainting is widely used today. There are many traditional algorithms to achieve that. However, most of them suffer from low speed because of pixel-by-pixel iteration. Besides, due to the roughly designed mask, some information of the original image is lost. Moreover, it can only propagate the texture and structure information in the original input image to fill the blank region. In our project, we propose an improved algorithm, trying to tackle these flaws.
Goal
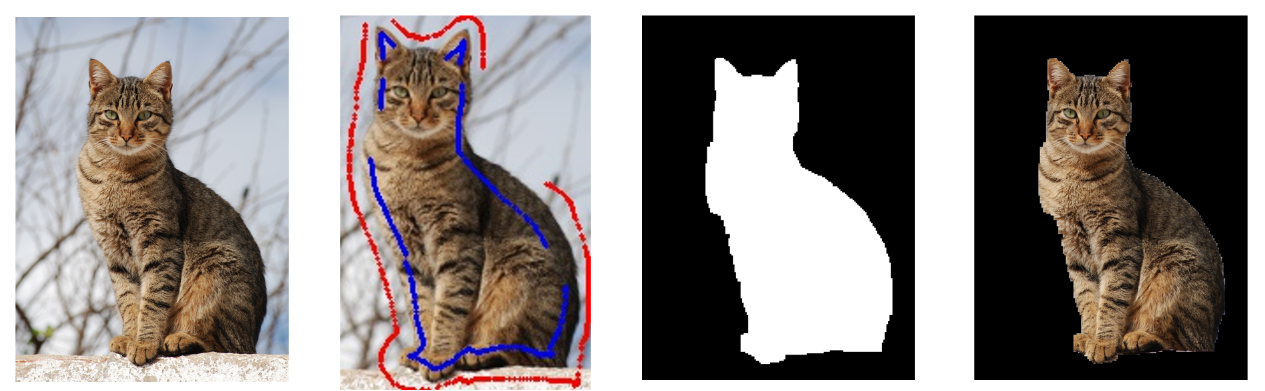
Given an image with an unwanted object, mask the unwanted object and fill the mask region.
Pipeline
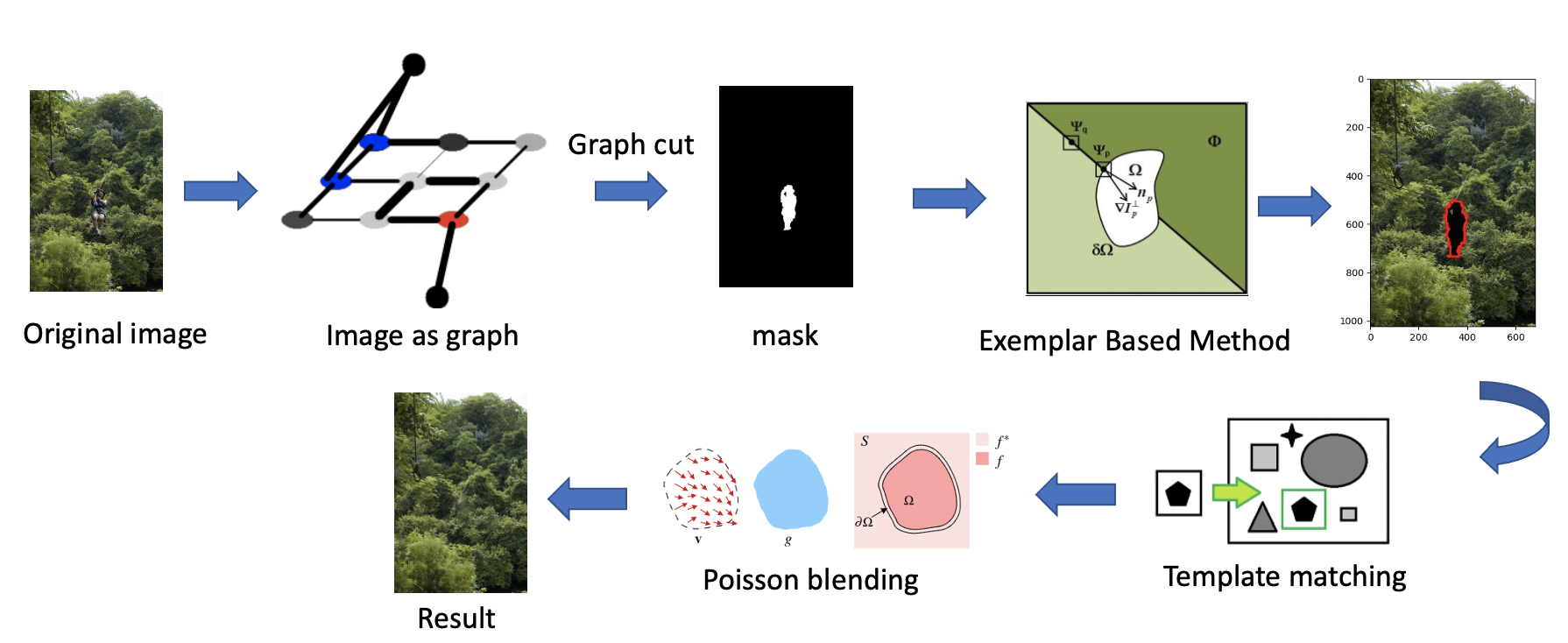
Methodology
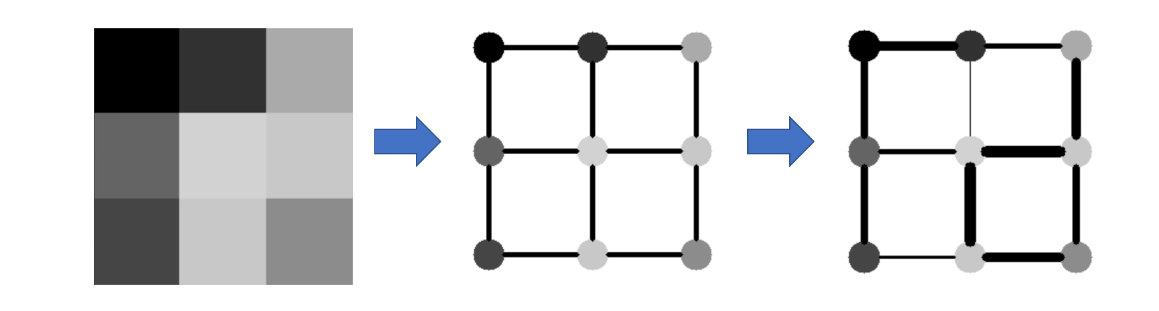
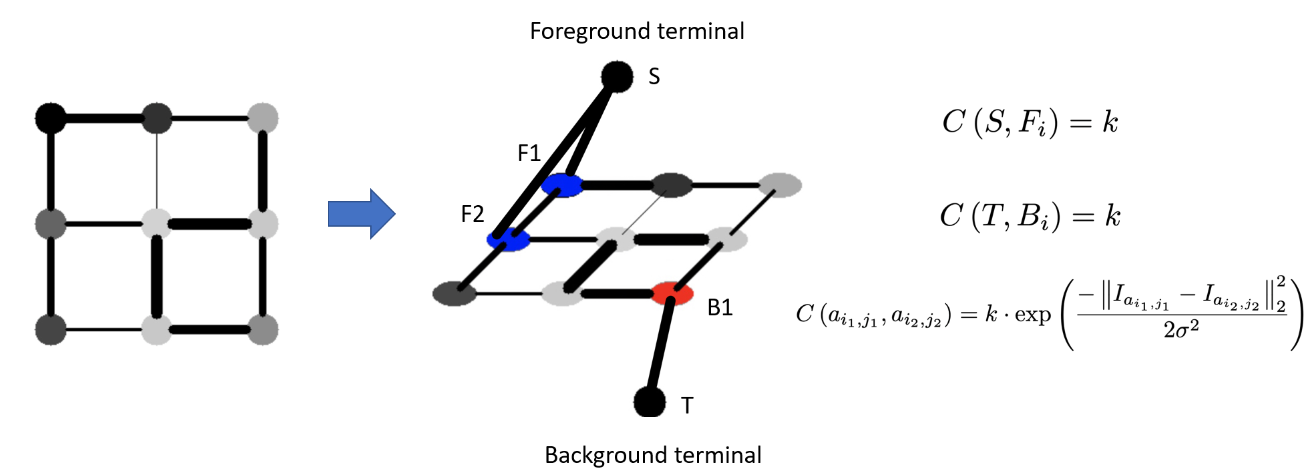
Segmentation Using Graph Cuts
Image as a graph
 Graph cut using Ford-Fulkerson Algorithm
Graph cut using Ford-Fulkerson Algorithm
Exemplar fill iteration
Find pixel with maximum Priority:
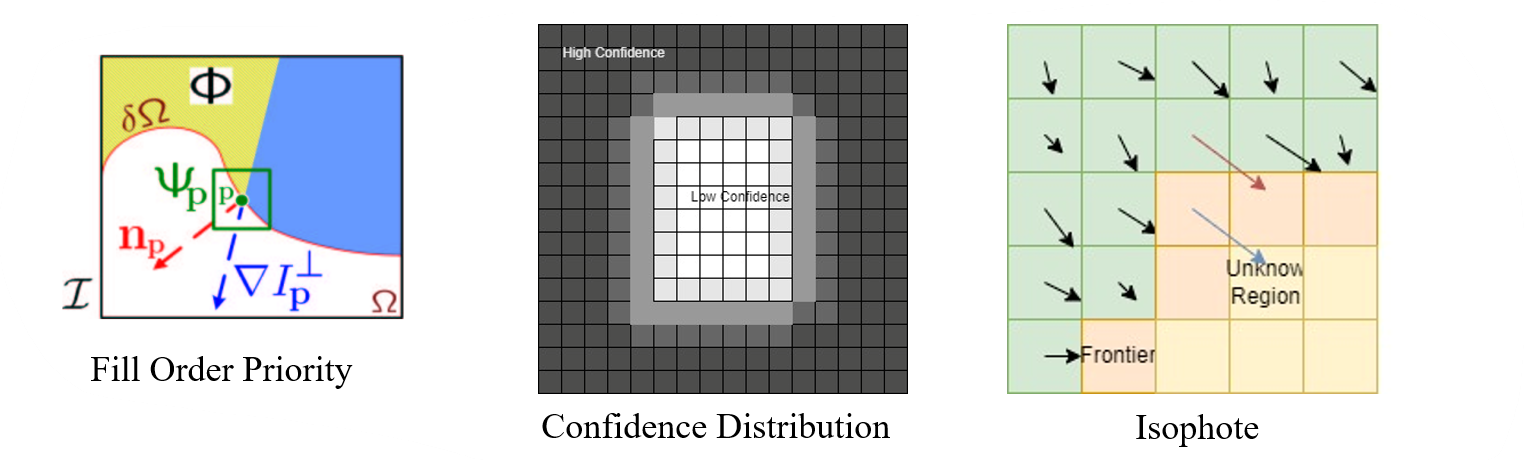
Filling order is crucial to non-parametric texture synthesis. Thus Exemplar-Based Inpainting designing a fill order which encourages the propagation of linear structure, together with texture. The algorithm will fill the best priority first. The priority computation is biased toward those patches which are on the continuation of strong edges and which are surrounded by high-confidence pixels.
The priority
The confidence term
Find near and similar texture:
In the patch matching stage, this algorithm define the distance not only by SSD of two patches but also add the locality similarity as a heuristic. The assumption is that the neighbor patches may contain similar textures, and can avoid matching different objects far from the pixel
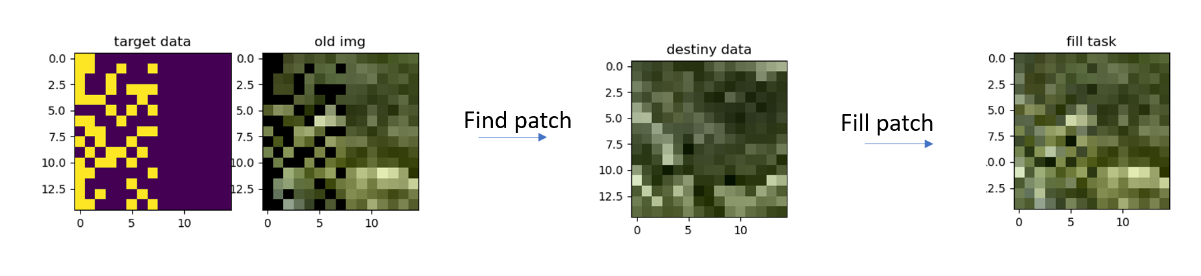
Using image patch around the mask do template matching (SSD)
This section introduces the scene completion algorithm to fill the rest region. Here users are allowed to input additional images similar to the original image. We then do template matching. We will use the patch around the mask as a template, denoted by
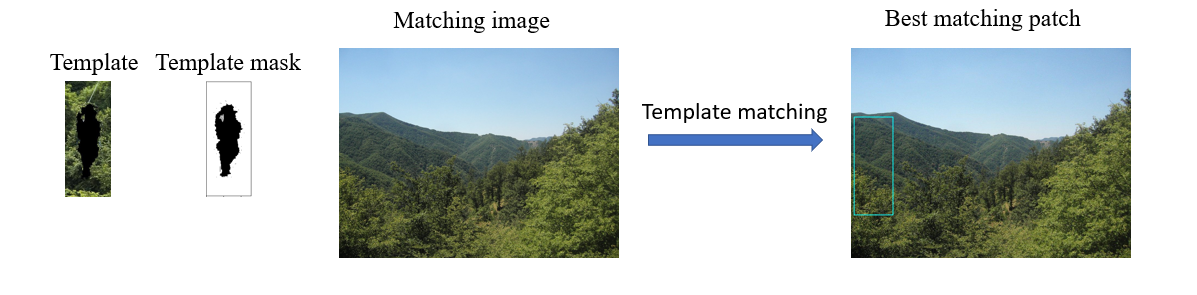
Using Poisson Blending to blend the best matching patch to the original image
In figure 1, the blue rectangle is the best-matching patch. Finally, as shown in figure, we will use Poisson blending to blend the best-matching patch to the template according to the mask.
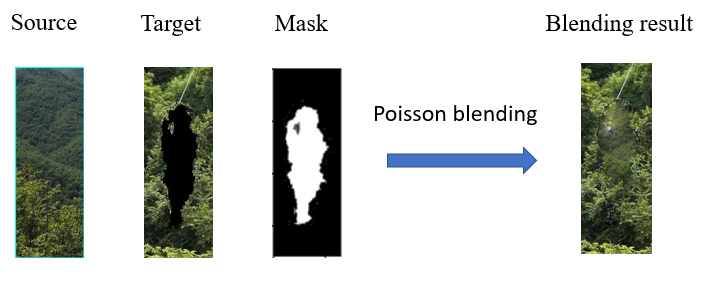
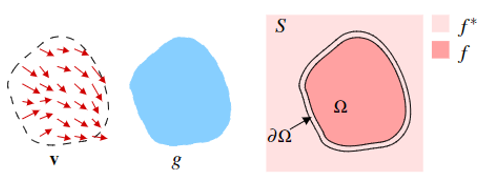
The process of blending is shown in Figure where
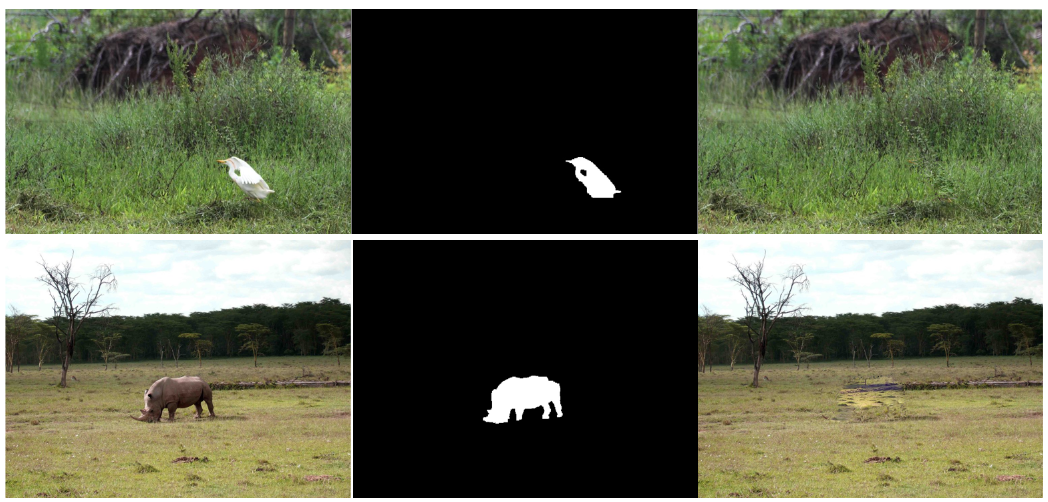
Results

References
Boykov, Yuri Y., and M-P. Jolly. "Interactive graph cuts for optimal boundary & region segmentation of objects in ND images." Proceedings eighth IEEE international conference on computer vision. ICCV 2001. Vol. 1. IEEE, 2001.
Criminisi, Antonio, Patrick Pérez, and Kentaro Toyama. "Region filling and object removal by exemplar-based image inpainting." IEEE Transactions on image processing 13.9 (2004): 1200-1212.
Hays, James, and Alexei A. Efros. "Scene completion using millions of photographs." ACM Transactions on Graphics (ToG) 26.3 (2007): 4-es.
Pérez, Patrick, Michel Gangnet, and Andrew Blake. "Poisson image editing." ACM SIGGRAPH 2003 Papers. 2003. 313-318.